


@article{li2024DGN,
title={Knowledge-Driven Visual Target Navigation: Dual Graph Navigation},
author={L,M,P,D,L,L},
journal={arXiv preprint arXiv:},
year={2024}
}
DGN
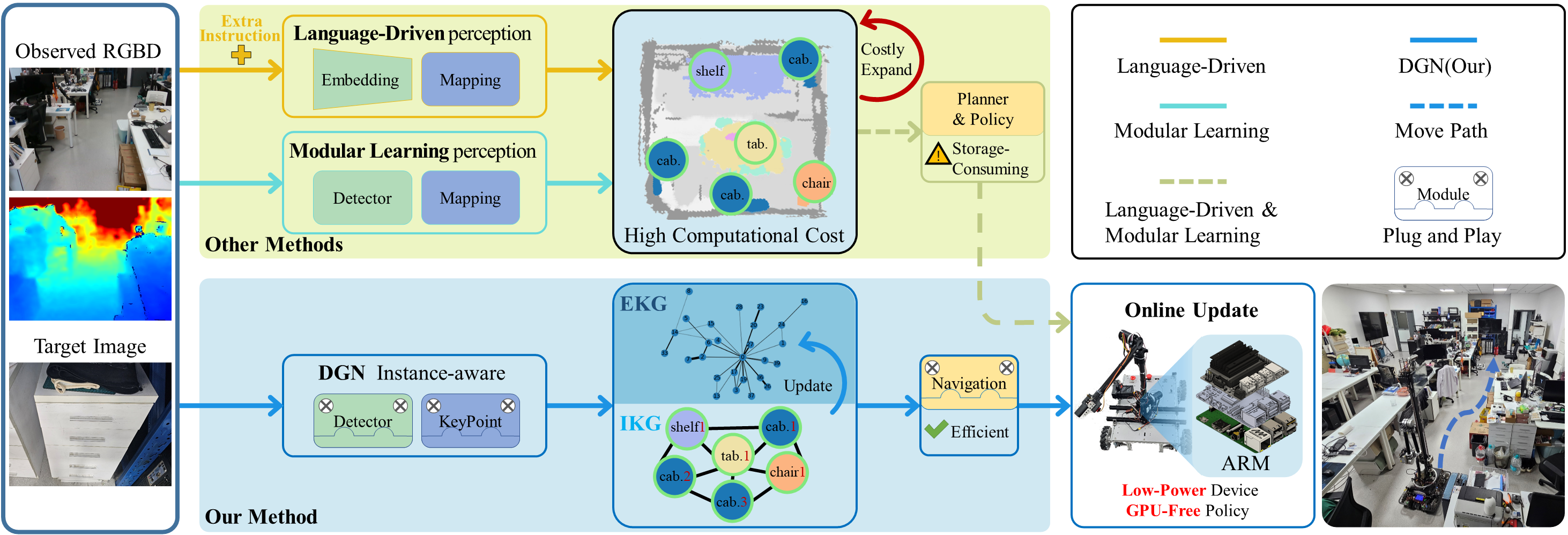
A knowledge-driven, lightweight image instance navigation framework
Visual target navigation is a critical task within the realm of embodied intelligence. The Existing end-to-end and modular approaches often encounter high computational demands, challenges in online updates, and limited generalization, which restrict their deployment on resource-constrained devices. To overcome these challenges, we introduce a knowledge-driven, lightweight image instance navigation framework, Dual Graph Navigation (DGN). The DGN constructs an External Knowledge Graph (EKG) using a limited dataset to capture prior correlation possibilities between objects, guiding the exploration process. During exploration, DGN builds an Internal Knowledge Graph (IKG) from an instance-aware module, recording explored regions and integrating with EKG to determine the next navigation target. The EKG is dynamically updated based on the outcomes of IKG exploration, continually enhancing the system's adaptability to the current environment. Additionally, DGN's plug-and-play modular design supports independent training and flexible replacement of target recognition, keypoint extraction, and path planning algorithms, reducing training and deployment costs while improving adaptability across diverse environments. We deploy DGN on three types of real-world robot platforms (including edge devices without CUDA support) and simulation environments (AI2THOR, Habitat), and our experimental results demonstrate that it operates stably, achieving state-of-the-art performance on the ProcTHOR-10K dataset.